
Teaching
Project: Human-Robot Interaction/Mensch-Roboter Interaktion
Winter Semester 2012/2013 & Summer Semester 2013
News/Aktuelles
- The project has been concluded successfully and the results have been presented in a final demonstration as well as in a report! Get the paper
- The project team will show the result of this project at the Students EXPO 2013.
Project video demonstration
|
|
|
General Information/Allgemeine Informationen |
|
| LV-Number: | 64-466 + 64-467 |
| Lecturer : | Prof. Stefan Wermter, Dr. Cornelius Weber, Stefan Heinrich, Johannes Bauer, Jorge Dávila-Chacón |
| Period: | Thu/Do 14-18 |
| Room: | F-235 |
| Credit Hours | 2 SWS Project + 2 SWS Seminar (Winter Semester) 4 SWS Project (Summer Semester) |
| Language: | English/Deutsch |
| Module: | MPM2 |
|
|
|
Contents/Inhalte
 |
|
|
Several research groups around the world are currently working on robotic devices capable of interacting with people as naturally as we interact with each other. What does it take for a robot to make us feel comfortable around it? And how can such a robot learn independently or by interaction with a person? These are the key topics in this project between interaction, cognition, learning and robotics.
Inspired by the idea of having a robot solve a simple task in a complex environment, we want to define and solve a task like coffee-serving in a home environment - which currently is a central RoboCup@Home challenge. Even such a simple task requires a broad set of interconnected, robust capabilities like vision, communication, motion, and planning, which motivates a bio-inspired approach to robotics. Adaptive mechanisms like machine learning and neural networks are of particular interest to make such systems robust. Wissenschaftsinstitute in der ganzen Welt arbeiten an Robotern, die in der Lage sind mit Menschen zu interagieren, wie Menschen dies untereinander können. Was macht einen Roboter aus, den wir in unserem Haushalt zu schätzen wüssten? Wie kann dieser selbstständig oder durch Interaktion mit dem Menschen lernen? Dies sind die zentralen Fragen in diesem Projekt zwischen Interaktion, Kognition, Lernen und Robotik. Inspiriert von der Idee dass ein Roboter eine einfache Aufgabe in einer komplexen Umgebung löst, wollen wir eine Aufgabe wie das Servieren eines Kaffees im eigenen Heim entwerfen und lösen, welche aktuell eine zentrale Herausforderung beim RoboCup@Home darstellt. Bereits für eine solch einfache Aufgabe bedarf es aber einer ganzen Reihe an verknüpften und robusten Fähigkeiten wie Bildverstehen, Kommunikation, Bewegungsfähigkeit und auch Planung, welche wiederum einen biologisch inspirierte Ansatz motivieren. Adaptive Verfahren wie das maschinelle Lernen und neuronale Netzwerke sind für dieses Projekt besonders interessant, um Systeme robust zu gestalten. |
|
|
|
Objective/Lernziel
The project Human-Robot Interaction offers the opportunity to learn about the complexities of daily action as well as the transfer to a system and to gain first experiences in the area of humanoid robotics. Essential concepts will be developed and implemented in suitable control algorithms for a robot. To achieve this goal and to arrive at expandable software, the problem will be segmented into several parts and solved based on teamwork.Das Projekt Mensch-Roboter Interaktion bietet die Gelegenheit, die Komplexität einfacher täglicher Handlungen zu verstehen, diese auf ein System zu übertragen und auf dem Gebiet der humanoiden Robotik erste Erfahrungen zu sammeln. Dabei sollen die notwendigen Konzepte entwickelt und in entsprechende Steuerungsalgorithmen für den Roboter umgesetzt werden. Um dieses Ziel zu erreichen und eine stetig erweiterbare Softwarearchitektur zu entwickeln, soll das Problem in Teile zerlegt und in Teamarbeit gelöst werden.
|
|
|
Procedure/Vorgehen
The course is spread over two semesters. In WS12/13, the integrated seminar (2SWS) offers the opportunity of diving into the topic and of choosing interesting capabilities that could be implemented. The practical project part (2 SWS) focuses on learning the software environment, neuro-cognitive foundations, and the collective planning of the global architecture. The project will be continued with 4SWS in SS13. The programming of single skills of the robot can be carried out in small separated teams. Via a robot middleware the different skills can be merged into an overall working robot system. Finally, the results will be documented and presented.Die Veranstaltung erstreckt sich über zwei Semester. Im WS12/13 gibt es mit dem integrierten Seminar (2 SWS) die Gelegenheit, sich in die Thematik einzuarbeiten und die interessanten Fähigkeiten, die dem Roboter verliehen werden können, auszuwählen. Der praktische Projektteil (2 SWS) dient dem Erlernen der Software-Umgebung und neurokognitiver Grundlagen sowie der gemeinsamen Planung der globalen Architektur. Das Projekt wird im SS13 mit 4 SWS fortgesetzt. Einzelne Fähigkeiten des Roboters können in kleinen eigenständigen Teams entwickelt werden. Mit Hilfe einer Roboter Middleware können verschiedene Fähigkeiten schließlich zu einem funktionierendem Gesamtsystem zusammengeführt werden. Abschließend werden die Ergebnisse dokumentiert und präsentiert.
|
|
|
Literature/Literatur
- Stückler, J., Holz, D., Behnke, S. RoboCup@Home: Demonstrating Everyday Manipulation Skills in RoboCup@Home. Robotics Automation Magazine, IEEE, 19(2): 34-42, 2012.
Get the paper, Get more information on RoboCup@Home - Krichmar , J.L., Wagatsuma, H. Neuromorphic and Brain-Based Robots. Cambridge Uni. Press, 2011.
- Marsland, S. Machine Learning: An Algorithmic Perspective. CRC Press, 2009.
- Murphy, R.R. Introduction to AI Robotics., MIT Press, Cambridge, MA, 2000.
- Webb, B., Consi, T.R. Biorobotics - Methods and Applications. AAAI Press, Menlo Park, CA., 2001.
|
|
|
Material
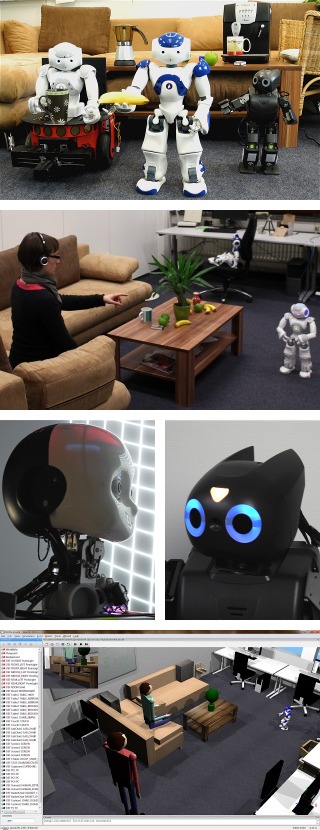
For a start a humanoid interactive NAO robot as well as a simulation software will be used, which can be programmed without deep hardware or simulation knowledge. The NAO robot has 25 degrees of freedom, two cameras, four microphones and the abilities to walk autonomously, to talk and to detect optical landmarks. Depending on the scenario that will be defined by the group we can use different mobile or static platforms like the NAO robot, the DARwIn-OP, the ICub head, or the Pioneer as well as external devices like the Kinect or boundary microphones.Für den Start in das Projekt wird ein humanoider interaktiver NAO Roboter sowie eine Simulationssoftware eingesetzt, welche ohne tiefe Hardware- bzw. Hardwaresimulationskenntnisse programmiert werden können. Der NAO verfügt über 25 Freiheitsgrade, zwei Kameras, vier Mikrophone und ist bereits in der Lage selbstständig zu laufen, zu sprechen und optische Landmarken zu erkennen. Abhängig vom Szenario, welches in der Gruppe entwickelt wird, können verschiedene mobile oder stationäre Roboterplattformen wie der NAO, der DARwIn-OP, der ICub Kopf oder der Pioneer, aber auch weitere externe Sensoren wie die Kinect oder ein Raummikrofon eingesetzt werden.
- Nao robot: http://www.aldebaran-robotics.com/en
- Webots simulation software: http://www.cyberbotics.com
Templates for seminar papers and presentations as well as further hints can be found on the web page: Hints for Seminars
Additional material for this course can be found within the MIN-CommSy portal:
Informatik-CommSy: WTM: Human-Robot Interaction 2012/13
|
|
|
This project is related to the topics of our European projects KSERA, RobotDoC and CINACS on interactive robots, which will allow participants to get in touch with the latest research in international project work.
Knowledge Technology international Projects: http://www.informatik.uni-hamburg.de/WTM/projects/