Abstract
For robots to share the environment and cooperate with humans without barriers, we need to guarantee safety to the operator and, simultaneously, to maximize the robot's usability. Safety is typically guaranteed by controlling the robot movements while, possibly, taking into account physical contacts with the operator, objects or tools. If possible, also the safety of the robot must be guaranteed. Not less importantly, as the complexity of the robots and their skills increase, usability becomes a concern. Social interaction technologies can save the day by enabling natural human-robot collaboration.
In this paper we show a possible integration of physical and social Human-Robot Interaction methods (pHRI and sHRI respectively). Our reference task is {\em object hand-over}. We test both the case of the robot initiating the action and, vice versa, the robot receiving an object from the operator. Finally, we discuss possible extension with higher-level planning systems for added flexibility and reasoning skills.
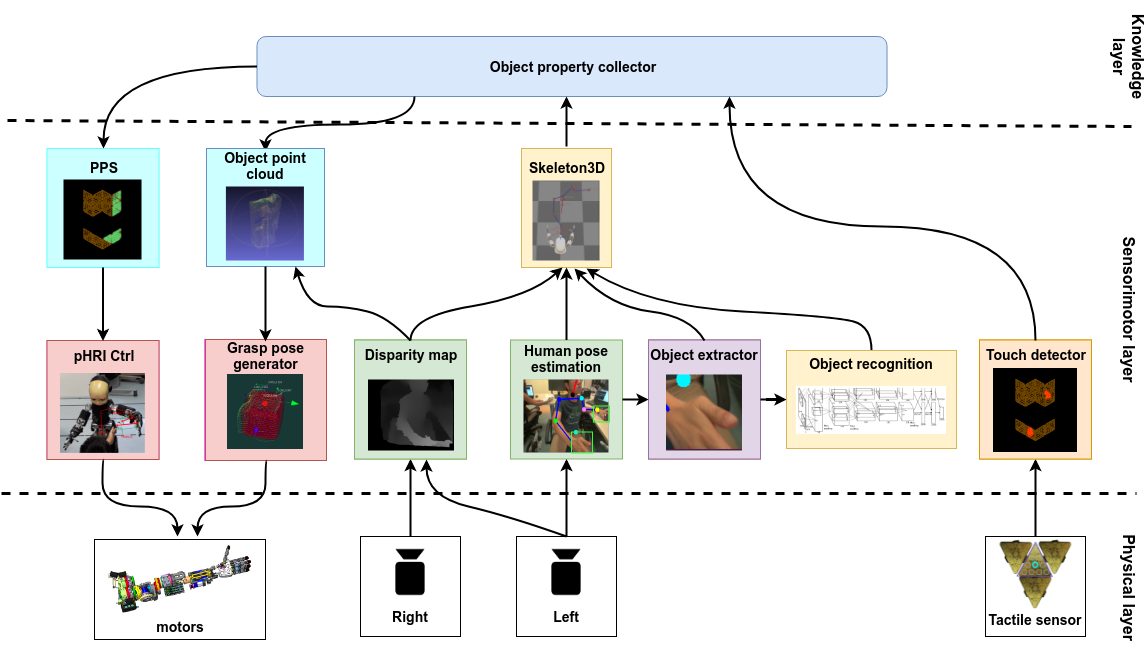
Architecture