
The Robotics for Development of Cognition Collegium (RobotDoC)
General Information |
|
| The RobotDoC Collegium is a multi-national doctoral training network for the interdisciplinary training on developmental cognitive robotics. The RobotDoC Fellows develop advanced expertise of domain-specific robotics research skills and of complementary transferrable skills for careers in academia and industry. They acquire hands-on experience through experiments with the open-source humanoid robot iCub, complemented by other existing robots available in the network's laboratories. The RobotDoC project is divided in seven nodes, Body, Brain, Feel and Want, See and Act, You and I, Think and Talk, Grow. The Knowledge Technology Group is in charge of the "BRAIN" node integrating new principles of brain-inspired learning in embodied cognitive robots. Two research lines are being address in this node, "Neural Emotion and Action Integration" and "Neural Cognitive Integration". |
|
| Leading Investigator: | Prof. Dr. S. Wermter, Dr. C. Weber |
| Associates: | N. Navarro-Guerrero, J. Zhong |
|
|
|
Neural Emotion and Action Integration - Nicolas Navarro-Guerrero
 |
Innate defensive mechanisms belong to the most important and essential capabilities for any organism. Although many of those innate responses are hard-coded in the brain, they are not sufficient for organisms' survival. They have to adapt to new and unexpected situations within their lifetime and thereby be able to interact effectively with their environment. A deeper understanding of these innate and learned defensive mechanisms could also be helpful for the development of future robot generations, making them more adaptable and robust. |
| We suggest a computational architecture to study affective evaluation of stimuli as an artificial affective and self-protective system. In addition, we plan to implement and test the proposed architecture on a real humanoid robot in a home-like environment. We focus on learning capabilities applied to the detection of harmful situations to the robot and seek for energy when required. These kinds of basic abilities are a part of affective and self-protective mechanisms that support more complex behaviors in biological organisms. We aim to emulate some of these capabilities in a humanoid robot. Our computational model is be based on neuro-physiological findings. | 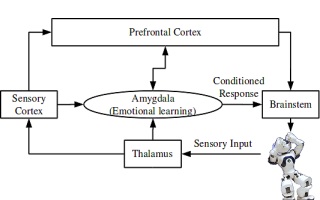 |
|
|
|
Neural Cognitive Integration - Junpei Zhong
 |
When social robots and persons are sharing the same domestic space, it is critical to make the robots act, think, and predict what other partners (humans or robots) do, which relates to building up an artificial system of social cognition with humanoid robots. The examination of the mirror neuron system model is one of the possible approaches to realize social interaction for social robotics. This system is considered to be one of the critical areas for social cognition. |
| The main objective of this project is to build up a computational functional model of the mirror neuron system, with emphasis on its role in action understanding with consideration of object affordance. To justify the correctness of our model, two NAO robots are applied to accomplish the experiment. Moreover, this research is also beneficial to the research of social robotics, in which it is crucial to make the robots act, think and predict what other partners (humans or robots) do when social robots and persons are sharing the same domestic space. |  |
|
|
|
Impressions from the Lab
| Towards the development of an artificial affective and self-protective system, we investigate and develop a real-world reinforcement learning approach to autonomously recharge a humanoid Nao robot. Using a supervised reinforcement learning approach, we are able to teach the robot to navigate towards a docking station, and thus extend the duration of autonomy of the Nao by recharging. The control concept is based on visual information provided by naomarks and six basic actions. It was developed and tested using a real Nao robot within a home environment scenario. No simulation was involved. | ||||
 (a) Approaching |
 (b) Alignment |
|||
 (c) Docking |
 (d) Recharging |
|||
| Pictures on the left: Top view of the autonomous robot behavior in its four different phases. | ||||
|
|
|
Project Publications
Zhong, J., Weber, C., Wermter, S. Learning Features and Predictive Transformation Encoding Based on a Horizontal Product Model. Proceedings of the 22nd International Conference on Artificial Neural Networks (ICANN 2012), LNCS 7552, pp. 539-546, Springer. Lausanne, CH, September 2012.
|
|
Navarro, N., Lowe, R., Wermter, S. A neurocomputational amygdala model of auditory fear conditioning: A hybrid system approach. Proceedings of the International Joint Conference on Neural Networks (IJCNN 2012), pp. 214-221, IEEE. Brisbane, AU, June 2012.
|
|
Navarro, N., Weber, C., Schroeter, P., Wermter, S. Real-world reinforcement learning for autonomous humanoid robot docking. Robotics and Autonomous Systems, Vol. 60, Issue 11, pp. 1400-1407, Elsevier, 2012.
|
|
Zhong, J., Weber, C. Wermter, S. Learning features and transformations with a predictive horizontal product model. Proceedings of the Sixteenth International Conference on Cognitive and Neural Systems (ICCNS 2012), Boston, US, May 2012.
|
|
Navarro, N., Lowe, R., Weber, C., Wermter S. Many-routes hypothesis of fear conditioning: a dynamical reservoir based approach. Marie-Curie Researchers Symposium Poster, Warsaw, PL, September 2011.
|
|
Zhong, J., Weber, C. Wermter, S. Restricted Boltzmann Machine with Transformation Units in a Mirror Neuron System Architecture. Proceedings of the IROS2011 Workshop on Cognitive Neuroscience Robotics (CNR), pp. 23-28, San Francisco, CA, USA, September 2011.
|
|
Navarro, N., Weber, W., Wermter, S. Real-world reinforcement learning for autonomous humanoid robot charging in a home environment. Proceedings of the 12th Annual Conference Towards Autonomous Robotic Systems (TAROS 2011), LNCS Vol. 6856, pp. 231-240, Springer Berlin/Heidelberg. Sheffield, UK, August 2011.
|
|
Zhong, J.P., Weber, C., Wermter S., Robot Trajectory Prediction and Recognition based on a Computational Mirror Neurons Model. Proceedings of the 21st International Conference on Artificial Neural Networks (ICANN 2011), LNCS 6792, Part II, pp. 333-340, Springer. Espoo, FI, June 2011. |
|
|
|
|
Further Information |
|
| Project Website: | http://robotdoc.org/ |
| The RobotDoc Collegium is co-financed by the European Commission under the Marie Curie Initial Training Networks and under the 7th Framework Programme (FP7) for Research and Technological Development. |
|